Манипулятор-перекладчик для расфасовки
Automotive
work inspection in automation with IAI electric actuators
| Актуаторы | ISA-MXM (3 шт) NS-LXMS RCP2-GRM |
| Контроллеры | Многоосевой контроллер |
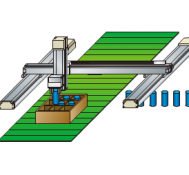
• Декартовый робот с захватом вынимает отформованные детали из литьевой машины в панельную конструктивную систему, которая выстраивает их в ряд.
• Обычно использовался мультисуставный шарнирный робот. Однако с ним были возможны отклонения от построения в ряд с разделительной плитой внутри панели, что периодически приводило к остановке производства.
• При использовании декартового робота IAI, оси X & Y можно легко и точно настроить – например меньшее количество остановок в производстве позволило улучшить использование производственной мощностей.
• Если качество детали неприемлемо, то она выбрасывается в контейнер для бракованных деталей.
• Кроме того, стоимость роботизированной системы можно уменьшить.